ROS2 Challenge#
I have used Ubuntu:Focal docker image and source installed Ros2 Foxy for these tasks.
docker pull ubuntu:focal
‘Hello! ROS2 is fun’#
This is introduction to creating a simple publisher and subscriber in ROS2. Basically there is one node that listens on a topic on which the other node talks.
Creating ROS2 package:#
cd <path/to/ros2_ws>/src
ros2 pkg create ros2_is_fun --build-type ament_cmake --dependencies std_msgs rclcpp
This will create ros2_is_fun package with following files and directory inside it.
ros2_is_fun/
CMakeLists.txt
package.xml
include/ros2_is_fun
src/
For more info on the function of these files see What makes up a ROS 2 package?
The source code publisher.cpp and subscriber.cpp will be added in the src directory.
The CMakeLists.txt will be edited to add the executable to the package and install them.
add_executable(publisher src/publisher.cpp)
ament_target_dependencies(publisher rclcpp std_msgs)
add_executable(subscriber src/subscriber.cpp)
ament_target_dependencies(subscriber rclcpp std_msgs)
install(TARGETS
publisher
subscriber
DESTINATION lib/${PROJECT_NAME})
Building the package#
colcon build --packages-select ros2_is_fun
Using the package#
To be able to run the executables, first source the setup files from install directory.
source install/local_setup.bash
source install/setup.bash
Run the executables:
ros2 run ros2_is_fun publisher
ros2 run ros2_is_fun subscriber

Source Code#
Source Code
Visualizing Laser Scan Data#

This part involves using laser sensors to scan the environment and visualize the data in rviz2.
Pre-requisites#
I have used turtlebot3_burger as the robot model, and dynamic_world as a model for the world.
Environment Setup#
My ~/.bashrc includes these lines:
source /opt/ros/foxy/setup.bash
source /usr/share/colcon_cd/function/colcon_cd.sh
export _colcon_cd_root=/opt/ros/foxy/
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash
export TURTLEBOT3_MODEL=burger
export GAZEBO_MODEL_PATH=/usr/share/gazebo-11/models:/opt/ros/foxy/share/turtlebot3_gazebo/models/:$GAZEBO_MODEL_PATH
Also, the package models if any need to be added to the path as well.
export GAZEBO_MODEL_PATH=/home/ros2_ws/src/jde_ros2_asgn/models:$GAZEBO_MODEL_PATH
Nodes#
To view the Laser Scans we need atleast 4 nodes:
Gazebo - The simulation environment.
gazebo $(ros2 pkg prefix --share jde_ros2_asgn)/worlds/dynamic_world.world
Robot State Publisher - To broadcast the state of the robot to the tf2 transform library.
ros2 run robot_state_publisher robot_state_publisher $(ros2 pkg prefix --share turtlebot3_description)/urdf/turtlebot3_burger.urdf
Teleop Twist Keyboard - The title is self-explanatory.
ros2 run teleop_twist_keyboard teleop_twist_keyboard
RViz2 - ROS vizualtion tool
rviz2
Launching the nodes#
I have created a launch file named laser_scan.launch in launch directory to launch all the nodes from one command.
(Except for the keyboard node, you know why.)
ros2 launch jde_ros2_asgn laser_scan.launch.py
and
ros2 run teleop_twist_keyboard teleop_twist_keyboard
Source Code#
laser_scan.launch.py
ROS2 Navigation2#
In simple terms we want our robot to move from point A to point B. But first, we need to know where the robot is (i.e. localization) and where are points A and B (i.e. mapping).
Background#
For mapping, I have used slam_toolbox package, to help estimate the robot position and create the map of the world.
Once a map is available we need to localize, which is done by creating a transform chain map -> odom -> base_link (Oh the errors here are painful!!!). We will use tf2 transform library to do that.
Now, what left is navigation.
Creating the Map#
We will launch the slam tool box, create a gazebo simulation world, visualize the map in rviz2 and teleop the robot.
ros2 launch slam_toolbox online_async_launch.py
ros2 launch jde_ros2_asgn navingation_tb3.launch.py
rviz2 -d $(ros2 pkg prefix --share jde_ros2_asgn)/rviz/mapping.rviz
ros2 run teleop_twist_keyboard teleop_twist_keyboard
Once, the mapping is done, we will save it using nav2_map_server.
ros2 run nav2_map_server map_saver_cli -f src/jde_ros2_asgn/maps/my_cafe --ros-args -p save_map_timeout:=10000
If I only had more time.#
I used up ~1.5 weeks of time for the following to work. Why? Because the challenge said “(or any other robot if you wish to).”
The issues mentioned were not the limitation, but the time was. Hence I then decided to move forward with the TurtleBot3.
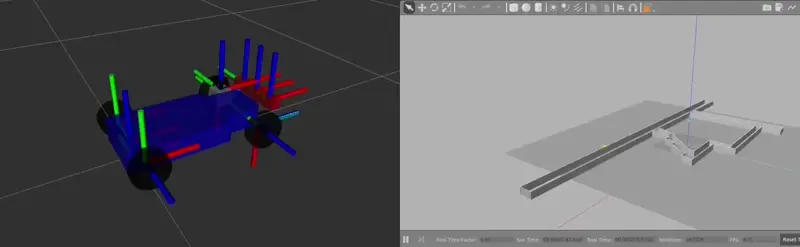
This is racecar model and tunnel world taken from mit-racecar which I guess is used for labs in Robotics: Science and Systems (MIT Course).
The issues I faced:
Spawning the robot URDF in Gazebo. (I beleive version issues or my skill isssues.)
The package was written using ROS kinetic.
The racecar is Ackermann-steering Robot, and this was my first time working with ackermann steering.
The other candidate robot model I had in mind was Sahayak-v3 developed at IvLabs.

References#
ROS & Docker: Docker Commands
ROS2 Foxy Tutorials: Writing a simple publisher and subscriber (C++)
std::bindfunction in C++: Bind Function and Placeholders in C++Gazebo not showing my models: include a model which is not in default path
Slow Colcon Build:
colcon buildon OSX is orders of magnitude slower than directmakeDynamic World Model: Dataset-of-Gazebo-Worlds-Models-and-Maps
View URDF in Gazebo: foxy/Tutorials/Intermediate/URDF & URDF in Gazebo
Saving Maps answers.ros.org/timeout error while saving map
ROS2 TurtleBot3: ros2_turtlebot3
Racecar URDF: mit-racecar/racecar_gazebo
Sahayak-V3: IvLabs/Sahayak-v3
Notes from courses done: ROS2 (Foxy-Humble) For Beginners I & ros-essentials